
This blog has been moved to davidskeck.github.io All future posts will be there.
Coding Like Curiosity – Part 3: Software Design and Conclusion
This project was completed on April 30th. That was the date that I presented this senior project to the students and faculty at NSU (Northeastern State University) in Tahlequah, OK. This post will serve as an overview of the software design and wrap up for this project.
Above is the GUI itself in action. (Remember, all of the code can be accessed here.) This piece of software served as a link between the laptop and robot. It was used to control movement by providing a method to start and stop, as well as speed controls. In addition to these functions, the GUI displays important information about the status of the robot. Battery status, link time, and sensor reports are shown textually and graphically for better UI.
Here’s an overview of the interactions between the pieces of software.
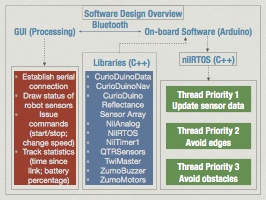
This graphic details how the software communicates and achieves the goals of the robot. A very interesting aspect of this project was that the nilRTOS use resulted in a 10-fold decrease in worst-case time-since-link. By carefully scheduling and prioritizing the threads, the robot was extremely quick to respond to objects, edges, and commands.
I certainly learned a lot from this project. When I began it, I knew nothing about Arduino, Real-time operating systems, Processing, or robotics. I was able to learn how to solder, read sensors, and integrate this all into a platform that communicated over bluetooth. This project truly serves the purpose of this blog. Learning more about science through coding and creating projects. I hope to complete many more projects like this one.
Thank you so much for following along for this project.
Coding Like Curiosity – Part 2: Building a Robot

In the last post I talked about learning to code in Arduino. This time I would like to talk about hardware. The pieces of hardware that I will be using have already been listed in the previous segment, but I will list them again here.
2. Pololu Zumo Shield with Robot and Reflectance Array
3. Three Sharp Digital Distance Sensors 5cm
4. Adafruit Bluefruit EZ Link Shield with Stacking Headers
Note: The Adafruit EZ Link Shield is only being used for communication currently because the board does not work well for reprogramming across bluetooth yet. (But, Adafruit is still working on it!)
EDIT (4/19/14): Adafruit has fixed their EZ-link!
For reference, here’s a pdf of the Uno board with all of the pins that are in use.
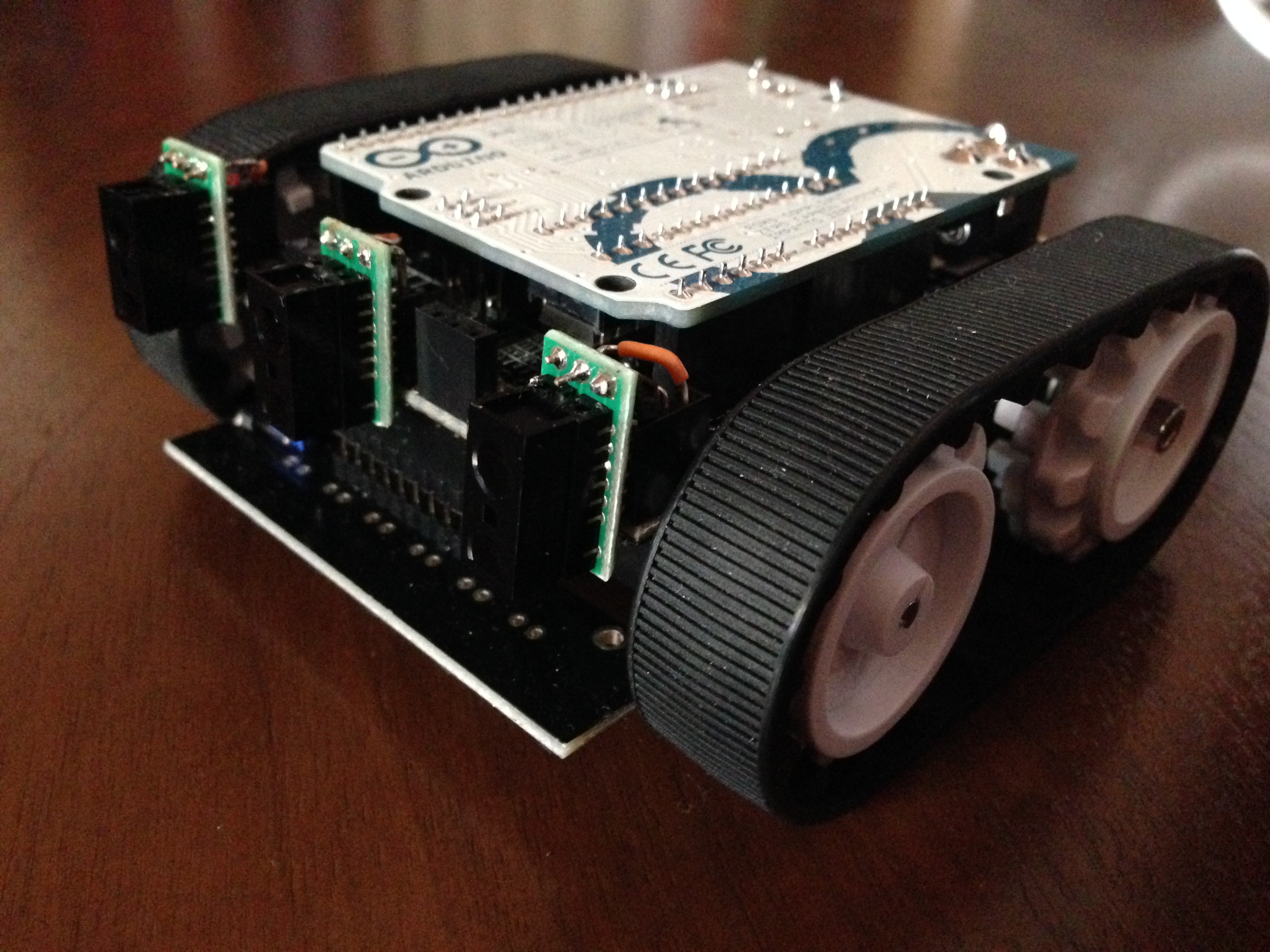
Let’s put CurioDuino together.
The first step is to purchase the ZumoBot chassis and assemble it, along with the Zumo Sensor Array from Pololu. If you read the above pdf carefully, you would notice that is necessary to cut traces between the four inside sensors of the array. Pololu shows how to accomplish this near the bottom of this page: http://www.pololu.com/docs/0J57/2.c
The next step is to get three of the 5cm obstacle sensors listed above. These will be put into place by soldering using 3 of the 3-pin female adapters into the front expansion of the ZumoShield. The pins that are used for these are listed in the pdf above. There may some confusion with this step. It is truly up to the builder to decide how these sensors will be attached. As long as the data pin is connected to the correct pin shown above, all the code will work correctly. I used a combination of right-angle pins and wire to attach these sensors to the front of CurioDuino.
Once these are in place, slide the the Adafruit Bluefruit EZ Link shield with stacking headers into the pins of the ZumoShield. Lastly, place the the Arduino Uno on top of the EZ Link. At this point, you have a fully assembled CurioDuino. All that is left is to upload the code to the Uno. Before doing this, ensure that the switch on the front of the EZ-link shield is set to “soft serial”.
All of the code is now available: http://github.com/davidskeck
There are three repositories (which all begin with CurioDuino) which contain everything, including the GUI. Before running the GUI, ensure that the constant titled PORT_NUMBER is set to the appropriate port for your project. Note that this project does not require bluetooth, but most cable solutions will limit the function of CurioDuino.
The next entry will focus on the software itself and the Real-Time operating system that it runs in.
Thank you for reading!
Coding Like Curiosity – Part 1: Arduino like a Pro
When I started this project, I knew almost nothing about Arduino. Today, I’m going to detail what I’ve learned about the Arduino platform over the past month.
Arduino is amazingly easy to get started in. If you know any C or C++, it just gets easier. I got an Uno board, then had a look over the example code and realized just how powerful the platform is. I can interface nearly any type of sensor and immediately start prototyping ideas.
As easy as it is to get started with simple programs (known as sketches to the Arduino community), there is a bit of a learning curve for those lacking electronics experience. For example, I didn’t know how to select the right value resistor for the LED circuits I made in the beginning. Thanks to some helpful online tutorials [0] I was able to understand Ohm’s law and why LEDs need resistors. Another thing that was unclear to me at first was how sensors worked with micro controllers. Learning this was a lot of fun.
Basically, you can have two types of sensors plugged into an Arduino input: digital or analog. If you’re doing a digital input, you’ve got two choices, 0 (LOW) or 1 (HIGH) [1]. If you’re doing analog, the microcontroller will report from 0 to 1023, depending on how much voltage is being detected [2]. Since the analog output pins on the Arduino can use pulse width modulation (PWM) to output from 0-255, you can use an analog input signal divided by 4 to map an analog input to an analog output [3]. Fun stuff!
One of the best resources I’ve found for learning the details of the Arduino IDE and for basic programming in C++ is Simon Monk’s book “Getting Started with Sketches” [4]. All the basics are covered. Very quick read, only 150 easy pages.
So, now that I’ve got a pretty good hold on Arduino and how it works, the possibilities truly seem infinite. Paring the ideas down into the essentials of what I want to accomplish in this project is one of the most important parts of this process. Planning carefully will save a lot of time later on. I won’t have to rewrite large blocks of code that I deem outside the scope of the project, because I will have all of the important stuff planned.Although, having such a huge amount of potential from a tiny microprocessor is a wonderful feeling.
Here’s what I’m currently planning to use for this project:
2. Pololu Zumo Shield with Robot and Reflectance Array
3. Three Sharp Digital Distance Sensors 5cm
4. Adafruit Bluefruit EZ Link Shield with Stacking Headers
A note on Adafruit’s Bluefruit Shield: I received mine not too long ago, and I experienced a lot of issues using it on a Macbook. Adafruit has acknowledged this issue, and released a software patch [5], but it didn’t fix everything for me. They’re currently working on making an entirely new board that fixes the issue without a software patch. Adafruit’s customer service was amazing on this issue. They refunded the purchase price and let me keep the board just in case I decide I have a use for it.
Thanks for following my progress on this project!
References
0. https://www.sparkfun.com/tutorials/219
1. http://arduino.cc/en/Reference/digitalRead
2. http://arduino.cc/en/Tutorial/AnalogInput
3. http://arduino.cc/en/Tutorial/PWM
4. http://www.amazon.com/Programming-Arduino-Getting-Started-Sketches/dp/0071784225
5. http://forums.adafruit.com/viewtopic.php?f=31&t=47431
Truly Curious: Examining the Mars Science Laboratory Software Development Process

Another project update is currently being drafted, but I wanted to post a quick update with a paper I wrote recently. It details the software development process for the Mars Science Laboratory. I find it truly fascinating, and I hope you do too.
Here’s the link: MSL Software PDF
Coding like Curiosity: Introduction

Real-time operating systems have fascinated me since before I even knew what they were. The first real-time application that really made me stop and think was the Curiosity’s (or Mars Science Laboratory’s) software platform. One set of applications are responsible for controlling everything the rover can accomplish. This huge amount of responsibility is handled by a strictly scheduled operating system called a real-time operating system (RTOS). To learn more about how to create critical software for these types of systems, I have decided to adopt some of the software architectural principles, as described by Ben Cichy [0], in a much (MUCH) smaller rover project of my own.
I am going to create a software platform for an Arduino powered robot that will run on an RTOS and be separated into independent modules just like the Curiosity flight software. It will communicate with my laptop wirelessly to provide log details and accept basic commands. The robot itself will be almost entirely autonomous, utilizing an infrared sensor array to detect platform edges and another pair of infrared detectors to avoid obstacles. I’ll be using the Arduino Uno and only have about 32KB for the entire software, including the RTOS libraries. As such, I plan to use the nilRTOS libraries, which were derived from the ChibiOS and are extremely small and lightweight [1].
This blog will be updated as the project progresses. I hope to have it all completed by May 2014. I’ll update with a parts list in the next segment in case any one would like to try a project of their own.
0. Cichy, B. (2010). The Evolution of the Mars Science Laboratory Flight Software. 2010 Workshop on Spacecraft Flight Software. Lecture conducted from California Institute of Technology. Pasadena, CA
1. https://code.google.com/p/rtoslibs/
